|
<Task>
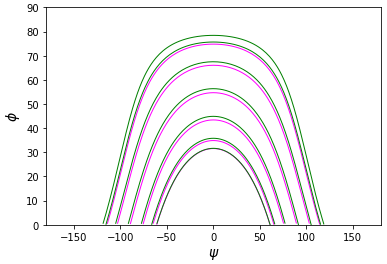
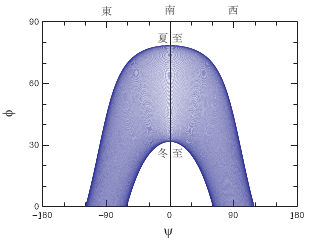
We track the sun from the point O of latitude α.
The position of the sun, P, is characterized by the rotation angle ψ in the horizontal east-west direction
and the rotation angle φ rising from the horizon.
ψ=0 is directed toward south and ψ<0 is in the east. φ=0 is the horizon.
|
We assume that the earth is a sphere and forms a circlular trajectory around the sun.
From geometry the movement of P is solved in terms of two-dimensional matrix for day d and hour jr with d=1..365 and jr=0..Nphis-1.
Actually the graph of ψ-φ has already been obtained in suntracker1.html (in Japanese, Modula-2).
Here we adopt Python to obtain similar results.
|
| <Python>
- Two modules in layers
- Lower layser, Stglobal, defines the functions for rotation.
- Upper layer, SunTrackerEx (MAIN), includes STpsiphi(day,time).
ψ[i,j],φ[i,j] are created within class getPsiPhi, followed by graphics display.
|
<Modula-2>
- Three modules in layers
- Lower layer,Stglobal, defines types, variables, functions, and arrays.
- Middle layer, STpplictions, defines the function STpsiphi(day,time).
- Upper layer, SunTracker (MAIN), determines arrays ψ[i,j] and φ[i,j], and displays graphics.
- Plotter output is shown above; screen output is of poor quality.
|
| <Python (Object Oriented Programming)>
ψ and φ are calculated at red code.
[Main] sunTrackerEx.py
import matplotlib.pyplot as plt
import numpy as np
import STglobalEx as STg
def STpsiphi(id, jr, Omegad0, alphad, deltad, Nphis):
......
class getPsiPhi:
def __init__(self,istep,daysyr,Omegad0,alphad,deltad,Nphis):
Nis = daysyr // istep + 1
if Nphis==0:
Nphis = 12
alpha = alphad*np.pi/180.0
delta = deltad*np.pi/180.0
DThetad = 360.0/float(Nphis)
DTheta = DThetad*np.pi/180.0
i = 0
ii = 0
psida = np.arange(Nis)
psidb = np.arange(Nis)
psi2 = np.zeros((Nis, Nphis))
phi2 = np.zeros((Nis, Nphis))
while(True):
phdprev = -1.0
for j in range(Nphis):
ps, ph, psd, phd, Om, Omd
= STpsiphi(i,j,Omegad0,alphad,deltad,Nphis)
if ii<Nis:
psi2[ii,j] = psd
phi2[ii,j] = phd
if phd*phdprev < 0.0:
if phd > 0.0:
psida[ii] = psd
else:
psidb[ii] = psd
phdprev = phd
ii += 1
if (i + istep) >= daysyr:
break
else:
i += istep
if Omd>1. :
Omd -= 360.0
self.Omegad = Omd
self.Nis = Nis
self.psida = psida
self.psidb = psidb
self.psi2 = psi2
self.phi2 = phi2
def plotPsiPhi():
......
w = getPsiPhi(daystep, daysyr, Omegad0, alphad, deltad, Nphis)
psi2 = w.psi2
phi2 = w.phi2
Nis = w.Nis
plotPsiPhi()
|
<Modula-2 (Structured Programming)>
ψ and φ are calculated at red code.
[MAIN] SunTracker.MOD
MODULE SunTracker
・・・・・・
RotationParams(mode);
i:= 0; (* for day number, INC = iskip or istep*)
ii:= 0; (* for arrays, INC = 1 *)
LOOP (* to scan days *)
phidprev:= -1.0;
FOR j:= 0 TO Nphis DO (* Dtheta = 360/Nphis *)
STpsiphi(psid,phid,psi,phi,i,j,delta,alpha,DTheta);
phione[j]:= phid; psione[j]:= psid;
phi2[ii,j]:= phid; psi2[ii,j]:= psid;
phidprev:= phid;
END; (* of FOR j:=0 TO Nphis-1 *)
IF (i MOD imon = 0) THEN
IF toPlt3D THEN
ChooseDataSequence(psione,phione,ndata,ii);
(* psione and phione redefined *)
Make3Ddata(psione,phione,ndata,u,v,w);
ReverseArray(v,ndata);
ReverseArray(w,ndata);
One3Dplot(v,w,ndata,uu,vv,njj,0);
(* Draw uu & vv in black, v & w in color *)
END;
END; (* of IF (i MOD imon = 0) *)
INC(ii); (* next dataset *)
IF isLeap AND(istep=2)
AND (daysyr-1>i)AND((daysyr-i)<=istep) THEN
i:= daysyr-1; (* daysyr = 365 or 366 *)
ELSIF (i+istep)>=daysyr THEN EXIT;
ELSE INC(i,istep);
END;
END; (* of LOOP, same as WHILE (i<=365) *)
[DEFINITION MODULE STglobal]
VAR
psi2,phi2,time2: ARRAY[0..Ahigh] OF
ARRAY[0..Angles] OF LONGREAL;
PROCEDURE MakeRotx(VAR xmatrix: ARRAY OF LongVector;
phi: LONGREAL);
PROCEDURE RotVector(VAR v: LongVector;
R: ARRAY OF LongVector);
PROCEDURE VectorProduct(VAR C: LongVector;
A, B: LongVector);
PROCEDURE ScalarProduct(A, B: LongVector): LONGREAL;
[DEFINITION MODULE STapplications]
PROCEDURE STpsiphi(VAR psid: LONGREAL;
VAR phid: LONGREAL;
VAR psi: LONGREAL;
VAR phi: LONGREAL;
id: INTEGER; (* days 0..365 *)
jr: INTEGER; (* earth's rotation *)
delta: LONGREAL; (* inclination angle*)
alpha: LONGREAL; (* latitude *)
DTheta: LONGREAL); (* angle step *)
|